뉴스레터
디지털 트윈 및 피지컬 AI 기반 자율 선로점검 기술 개발 착수
작성자홍보협력실
등록일 2026-06-25
조회수58
- AI 로봇이 철도 선로를 스스로 점검
철도연이 AI와 로봇 기술을 활용해 철도 선로를 스스로 점검하는 자율 점검 기술 개발에 착수했다. 이번 연구는 가상공간에서 학습한 로봇이 실제 철도 현장에서 안전하게 점검 작업을 수행할 수 있도록 하는 것이 목표다.
철도 선로 점검은 작업자가 직접 선로에 들어가야 하는 경우가 많아 안전사고 위험이 크다. 또한 실제 사고나 결함 사례가 많지 않아 AI가 학습할 데이터를 충분히 확보하기 어렵고, 위험한 상황을 반복적으로 실험하기도 쉽지 않다.
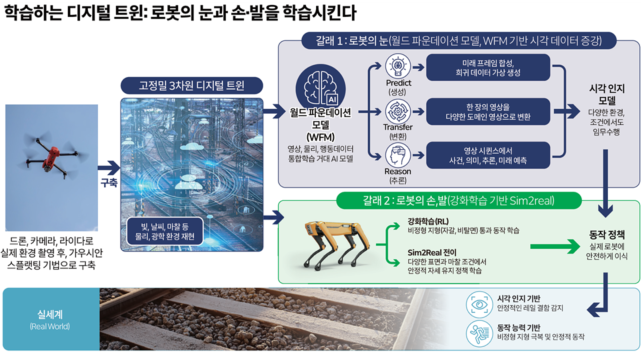
철도연은 이러한 문제를 해결하기 위해 실제 철도와 동일한 환경을 구현한 디지털 트윈을 구축한다. 드론과 카메라, 라이다(LiDAR) 등을 활용해 실제 선로를 3차원 가상공간으로 구현하고, 이를 자율 점검 로봇의 학습장으로 활용한다.
가상공간에서는 선로 침입, 장애물, 폭설·폭우, 야간, 역광 등 다양한 환경과 돌발 상황을 자유롭게 구현할 수 있다. 로봇은 이러한 환경을 반복 학습하며 주변을 정확하게 인식하고 안전하게 이동하는 능력을 키운다. 학습 결과는 실제 로봇에 적용되며, 현장에서 수집한 데이터를 반영해 성능을 지속적으로 개선할 수 있다.
철도연은 이번 연구를 통해 철도 유지보수 방식을 사고 발생 후 대응하는 체계에서 위험을 미리 발견하는 예방 중심의 자율 점검 체계로 전환할 계획이다. 이를 통해 현장 작업자의 안전을 높이고, AI와 로봇을 활용한 한국형 자율 철도 점검 기술의 경쟁력도 강화할 것으로 기대하고 있다.
첨부파일
컨텐츠 담당자
- 담당부서 : 홍보문화실
- 연락처 : 031-460-5183
이 페이지에서 제공하는 정보에 대하여 만족하십니까?